一、简介
OTHKA-TV是一款针对广电系统研发的摄像机运动控制系统,它的出现主要解决虚拟演播系统下的运镜问题,并且通过灵活的可达空间,替代传统的多机位布置,是全媒体交互式演播室的重要组成部分。

二、功能特点
1、替代多机位
MOCO-TV通过机械臂与轨道的配合可以达到演播室内大部分位置,替代传统多机位布置。
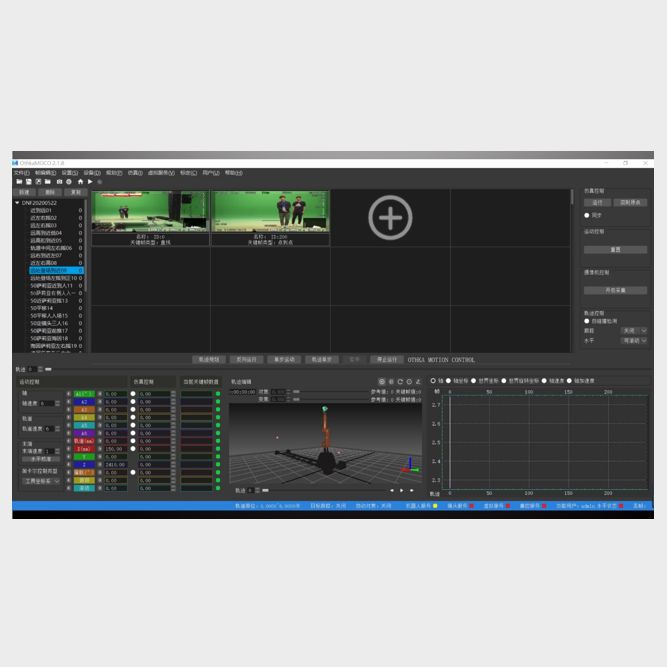
2、轨迹设计功能
用户可自行定义关键帧之间的运行方式,包括直线运动,点到点运动,圆弧运动及其组合等;轨迹的运动速度,运行时间用户可自行设定,运动轨迹具备可视化显示。
3、镜头控制
MOCO-TV集成了镜头控制模块,对富士和佳能镜头推拉和聚焦可以进行实时控制。
4、摄像机6自由度控制功能
提供受控摄像机6自由度的控制,即可控制基于指定坐标系的平移和旋转操作。
5、关键帧运行时间精确控制
用户自由设定关键帧之间运行时间,实际运行时间误差在12ms以内。
6、镜头水平锁定功能
保证实时控制过程中镜头始终保持水平状态,镜头水平锁定中提供了指定位置主持人锁定功能。
7、对接外部系统
MOCO-TV可以与Vizrt等虚拟演播室系统进行对接,实时发送数据给虚拟系统进行渲染,实现虚拟演播室下的自由运镜。提供与集中控制系统的对接,可由集中控制系统指定运行相关机位及相关轨迹。

三、典型案例
(OTHKA®)TV版在演播室中的使用,提供直播摄像机的搭载、摄像机光心跟踪、关键点的记录、摄像机的对焦、变焦的控制、渲染系统的实时对接等功能。
1、苏州电视台
苏州广电总台全媒体新闻演播室由9次艾美奖演播室获得者Erik亲自抄刀设计,全景化、全媒体、全高清、交互式,既有的舞美设计加上不同节目的包装结合奥视佳MOCO更是如虎添翼,从2017年7月18号启用,为苏州观众奉上了全新的视听体验。该演播室在2018全美广播电视展(NAB)开幕式上荣获国际类新闻演播室舞美设计大奖。


奥视佳摄像机运动控制系统 | ||||||
序号 | 产品名称 | 参数 | ||||
1 | 六轴机器人系统 | 包括机器人本体、机器人控制柜、示教器; 机器人本体参数: 工作半径2010mm;重复定位精度0.05mm; 本体重量250KG,最大负载28KG;运动轴数量为6个旋转轴; 基座旋转范围320度,速度200度/秒; 下臂摆动范围275度,速度200度/秒; 上臂摆动范围300度,速度255度/秒; 腕部旋转范围360度,速度315度/秒; 腕部摆动范围225度,速度360度/秒; 云台旋转范围360度,速度870度/秒。 | ||||
包括机器人底座一个; 数字信号接口一套; 摄像机安装连接云台一个。 | ||||||
一根机器人动力线;一根380v电源线; 一根镜头控制线;一根网线;一根sdi线; 两个急停按钮。 | ||||||
2 |
运动控制主机 | 硬件:处理器i7,内存16G, 固态硬盘500G,采集卡; 摄像机运动控制系统控制软件:包含机器人与镜头的实时控制、镜头运行轨迹的编辑和虚拟仿真、机器人和镜头的精确同步重复运行、摄像机跟踪和水平锁定、用户权限管理、与VIZRT系统的数据对接等; a) 机器人实时控制 ★ 使用网络通讯实时控制机器人,可采取单轴与末端两种控制方式,通讯周期稳定,最高可以达到4ms的通讯间隔。 b) 镜头实时控制 ★具备对广播级摄像机Fujinon、Canon全伺服镜头控制器的直接控制功能,同时支持cmotion、tilta外置镜头控制器对镜头的焦距和对焦进行实时精确控制。具备轨迹运行过程中变焦、对焦的自动化处理功能。 c) 镜头运行轨迹的编辑和虚拟仿真 ★ 设定摄像机运动轨迹关键帧,每条运动轨迹最大支持99个关键帧的保存,自动生成完整的运动轨迹。支持对轨迹运行时间、等待时间、运行方式等的设置,同时提供摄像机器人仿真可视化操作界面。 d) 机器人和镜头的精确同步运行 ★ 系统采用同步机制,控制机器人与镜头精确同步运动,实现整个拍摄过程的智能化。同时保存多条运动轨迹,实现不同轨迹的快速切换运行和精确重复运行,重复精度达到0.05mm。 e) 摄像机跟踪和水平 ★ 具备高精度的实时定位跟踪功能,支持摄像机始终对准静止的对象拍摄,位置和角度的误差小于5mm和0.3度。具备摄像机姿态水平锁定功能,使摄像画面能够始终保持水平。 f) 用户权限管理 ★ 具备用户管理功能,实行用户权限分级制度,对不同类型用户的权限提供编辑功能。 g) 对接外部系统 ★ 支持free-d协议,可与VIZRT等虚拟演播室系统对接。支持与MOSART等集控系统的对接,可由集控系统指定运行相关机位及轨迹。支持与UNREAL等主流渲染引擎对接,可保证虚拟摄像机与真实摄像机的位置和姿态精准匹配,误差小于2mm和0.1度,同时提供相应可视化的插件。 | ||||
3 | 机器人平移直线轨道(第七轴) | OTHKA | TJ1000 | 套 | 1 | 机器人平移直线轨道,长度10米; 包含减速机与伺服电机一套,最大速度1.5米/秒,定位精度0.5mm; 可选化学螺栓固定在地面的安装方式; 轨道设有可调节地脚,地脚可调节行程20mm; 轨道两端设有硬限位结构,防止机器人冲出导轨。 |